Input-to-State Stable Coupled Oscillator Networks for Closed-form Model-based Control in Latent Space
{kind=link}
Abstract
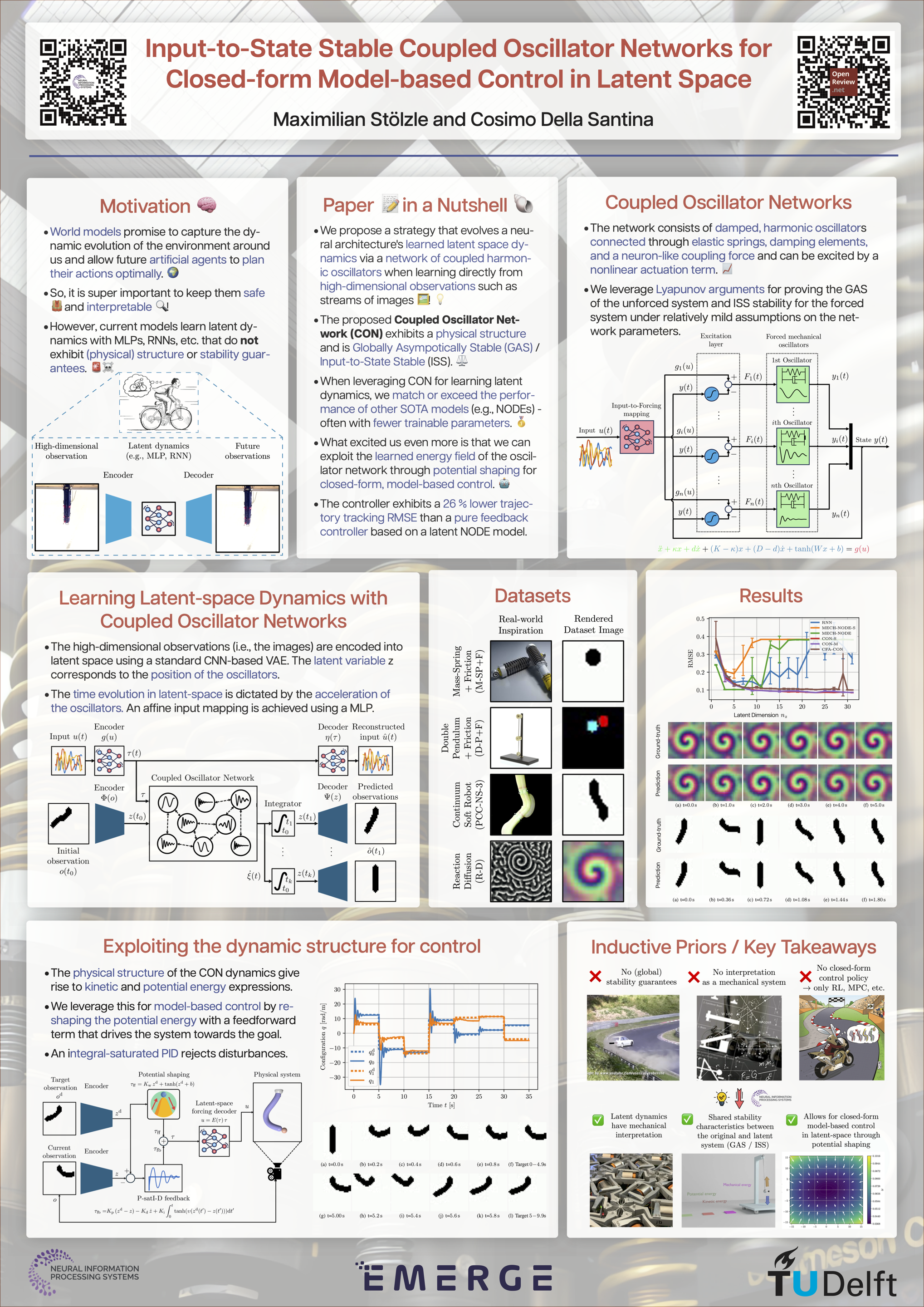
Even though a variety of methods have been proposed in the literature, efficient and effective latent-space control (i.e., control in a learned low-dimensional space) of physical systems remains an open challenge.We argue that a promising avenue is to leverage powerful and well-understood closed-form strategies from control theory literature in combination with learned dynamics, such as potential-energy shaping.We identify three fundamental shortcomings in existing latent-space models that have so far prevented this powerful combination: (i) they lack the mathematical structure of a physical system, (ii) they do not inherently conserve the stability properties of the real systems, (iii) these methods do not have an invertible mapping between input and latent-space forcing.This work proposes a novel Coupled Oscillator Network (CON) model that simultaneously tackles all these issues. More specifically, (i) we show analytically that CON is a Lagrangian system - i.e., it possesses well-defined potential and kinetic energy terms. Then, (ii) we provide formal proof of global Input-to-State stability using Lyapunov arguments.Moving to the experimental side, we demonstrate that CON reaches SoA performance when learning complex nonlinear dynamics of mechanical systems directly from images.An additional methodological innovation contributing to achieving this third goal is an approximated closed-form solution for efficient integration of network dynamics, which eases efficient training.We tackle (iii) by approximating the forcing-to-input mapping with a decoder that is trained to reconstruct the input based on the encoded latent space force.Finally, we leverage these three properties and show that they enable latent-space control. We use an integral-saturated PID with potential force compensation and demonstrate high-quality performance on a soft robot using raw pixels as the only feedback information.