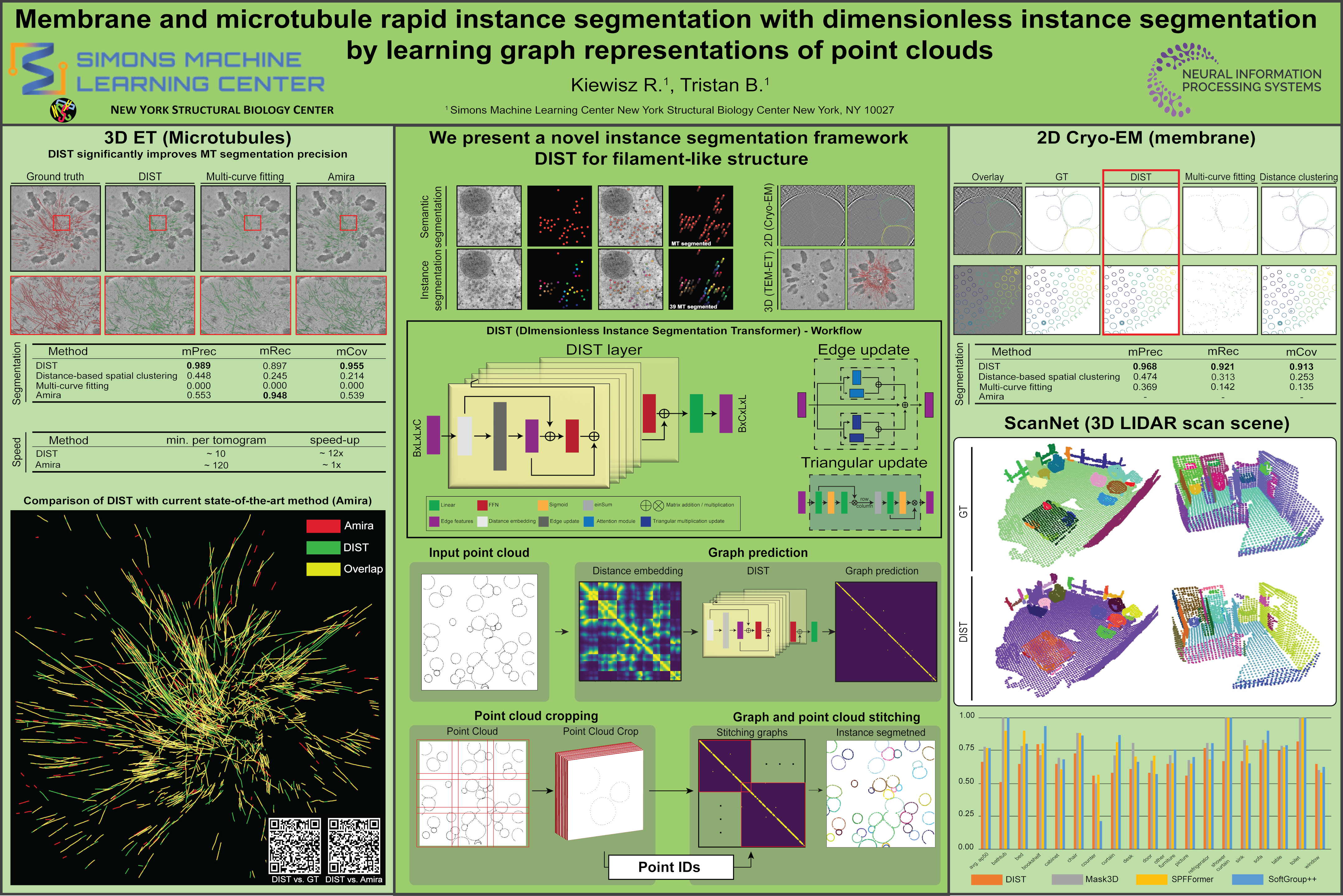
Membrane and microtubule rapid instance segmentation with dimensionless instance segmentation by learning graph representations of point clouds
{kind=link}
Abstract
Point clouds are an increasingly common spatial data modality, being produced by sensors used in robotics and self-driving cars, and as natural intermediate representations of objects in microscopy and other bioimaging domains (e.g., cell locations over time, or filaments, membranes, or organelle boundaries in cryo-electron micrographs or tomograms). However, semantic and instance segmentation of this data remains challenging due to the complex nature of objects in point clouds. Especially in bioimaging domains where objects are often large and can be intersecting or overlapping. Furthermore, methods for operating on point clouds should not be sensitive to the specific orientation or translation of the point cloud, which is often arbitrary. Here, we frame the point cloud instance segmentation problem as a graph learning problem in which we seek to learn a function that accepts the point cloud as input and outputs a probability distribution over neighbor graphs in which connected components of the graph correspond to individual object instances. We introduce the Dmensionless Instance Segmentation Transformer (DIST), a deep neural network for spatially invariant instance segmentation of point clouds to solve this point cloud-to-graph problem. DIST uses an SO(n) invariant transformer layer architecture to operate on point clouds of arbitrary dimension and outputs, for each pair of points, the probability that an edge exists between them in the instance graph. We then decode the most likely set of instances using a graph cut. We demonstrate the power of DIST for the segmentation of biomolecules in cryo-electron micrographs and tomograms, far surpassing existing methods for membrane and filament segmentation in empirical evaluation. We anticipate that DIST will underpin a new generation of methods for point cloud segmentation in bioimaging and that our general model and approach will provide useful insights for point cloud segmentation methods in other domains.