Learning Free Energy Pathways through Reinforcement Learning of Adaptive Steered Molecular Dynamics
Nicholas Ho ⋅ John Kevin Cava ⋅ John Vant ⋅ Ankita Shukla ⋅ Jacob Miratsky ⋅ Pavan Turaga ⋅ Ross Maciejewski ⋅ Abhishek Singharoy
{kind=link}
Abstract
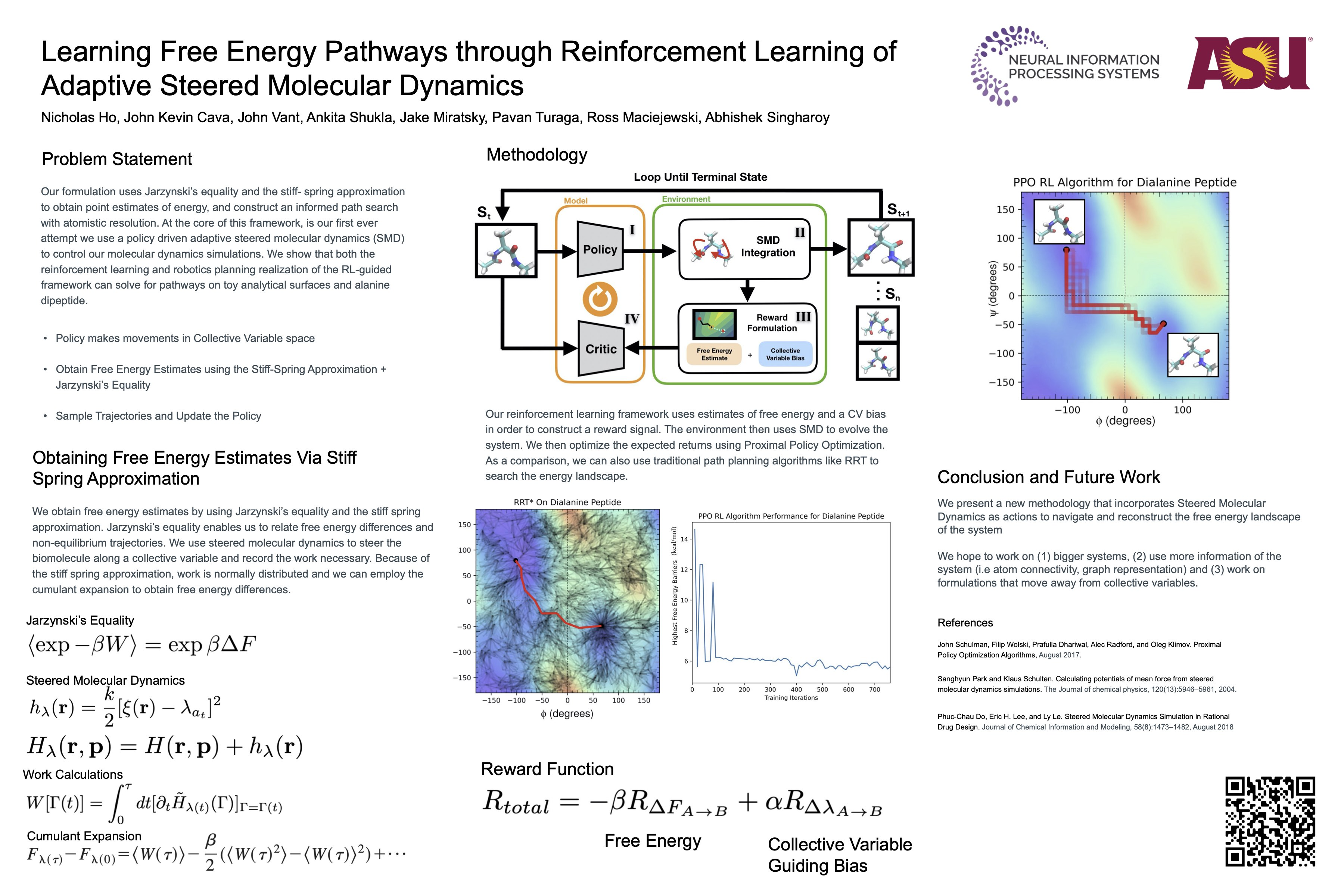
In this paper, we develop a formulation to utilize reinforcement learning and sampling-based robotics planning to derive low free energy transition pathways between two known states. Our formulation uses Jarzynski's equality and the stiff-spring approximation to obtain point estimates of energy, and construct an informed path search with atomistic resolution. At the core of this framework, is our first ever attempt we use a policy driven adaptive steered molecular dynamics (SMD) to control our molecular dynamics simulations. We show that both the reinforcement learning and robotics planning realization of the RL-guided framework can solve for pathways on toy analytical surfaces and alanine dipeptide.
Video
Chat is not available.
Successful Page Load