I see you: A Vehicle-Pedestrian Interaction Dataset from Traffic Surveillance Cameras
Hanan Ronaldo Quispe Condori ⋅ Jorshinno Sumire Mamani ⋅ Rut Patricia Condori Obregon ⋅ Edwin Alvarez Mamani ⋅ harley vera olivera
{kind=link}
Abstract
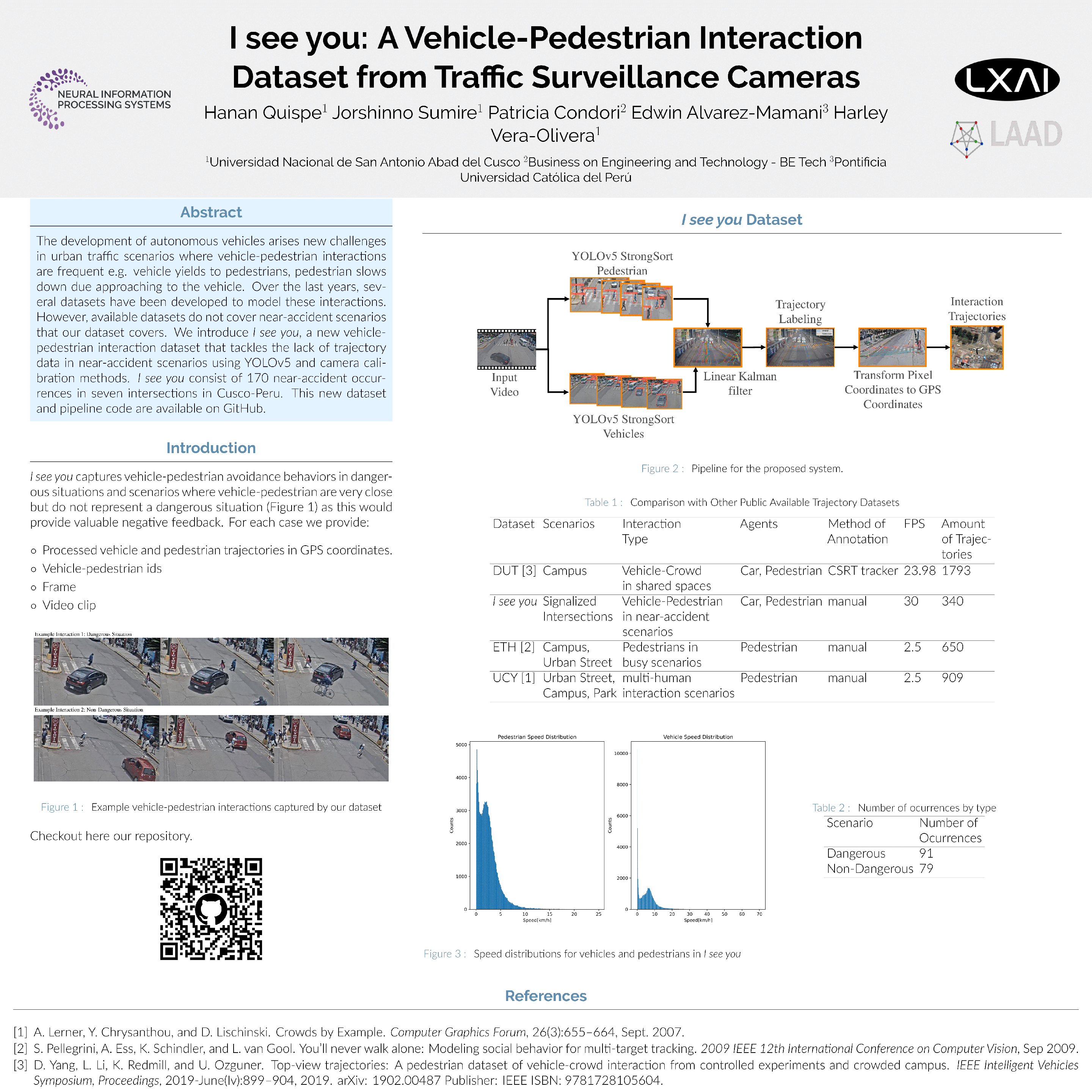
The development of autonomous vehicles arises new challenges in urban trafficscenarios where vehicle-pedestrian interactions are frequent e.g. vehicle yields topedestrians, pedestrian slows down due approaching to the vehicle. Over the lastyears, several datasets have been developed to model these interactions. However,available datasets do not cover near-accident scenarios that our dataset covers.We introduce I see you, a new vehicle-pedestrian interaction dataset that tacklesthe lack of trajectory data in near-accident scenarios using YOLOv5 and cameracalibration methods. I see you consist of 170 near-accident occurrences in sevenintersections in Cusco-Peru. This new dataset and pipeline code are available onGitHub.
Chat is not available.
Successful Page Load