Optimizing Relevance Maps of Vision Transformers Improves Robustness
{kind=link}
Abstract
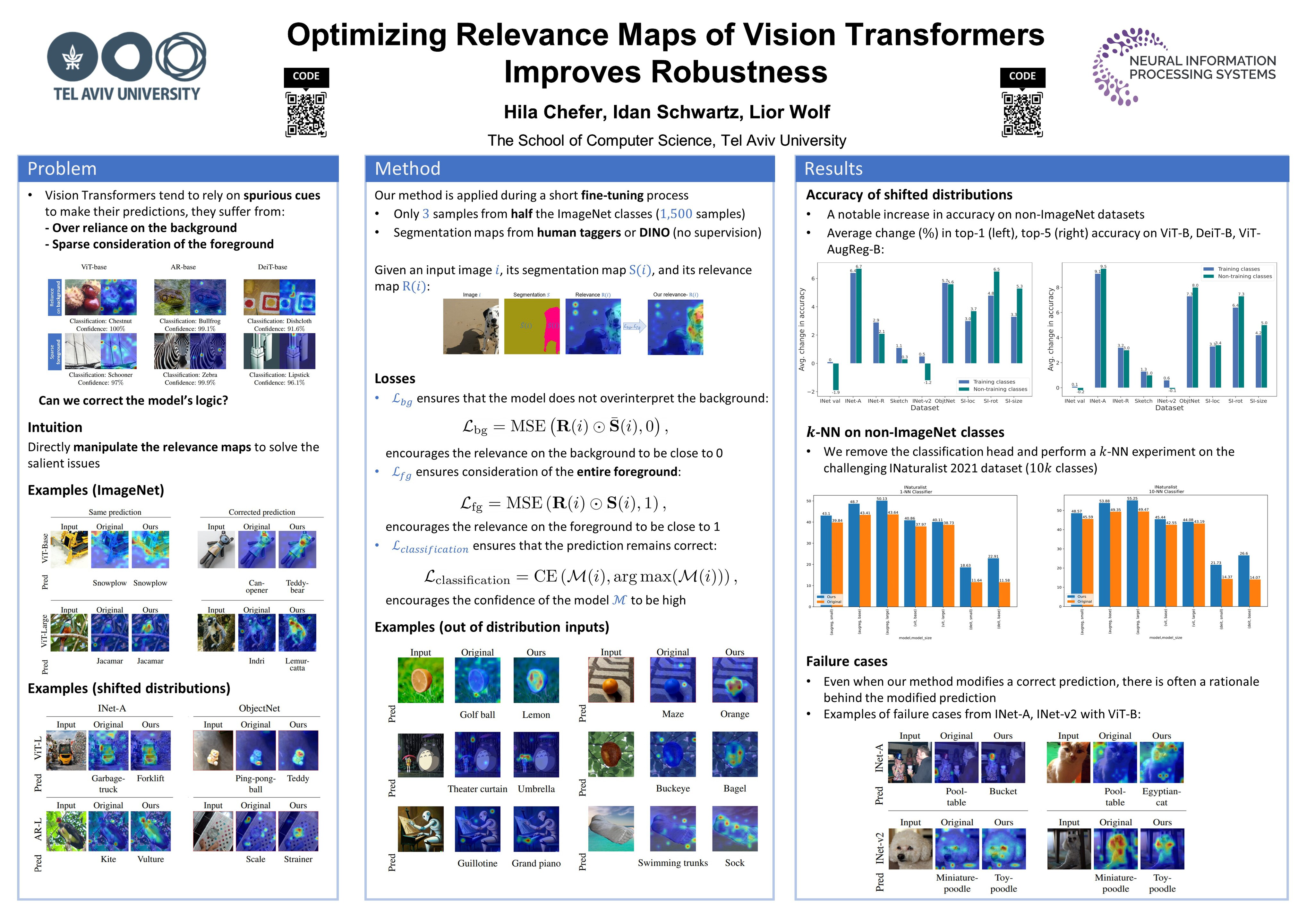
It has been observed that visual classification models often rely mostly on spurious cues such as the image background, which hurts their robustness to distribution changes. To alleviate this shortcoming, we propose to monitor the model's relevancy signal and direct the model to base its prediction on the foreground object.This is done as a finetuning step, involving relatively few samples consisting of pairs of images and their associated foreground masks. Specifically, we encourage the model's relevancy map (i) to assign lower relevance to background regions, (ii) to consider as much information as possible from the foreground, and (iii) we encourage the decisions to have high confidence. When applied to Vision Transformer (ViT) models, a marked improvement in robustness to domain-shifts is observed. Moreover, the foreground masks can be obtained automatically, from a self-supervised variant of the ViT model itself; therefore no additional supervision is required. Our code is available at: https://github.com/hila-chefer/RobustViT.