Representing Spatial Trajectories as Distributions
Didac Suris Coll-Vinent ⋅ Carl Vondrick
2022 Poster
{kind=link}
Abstract
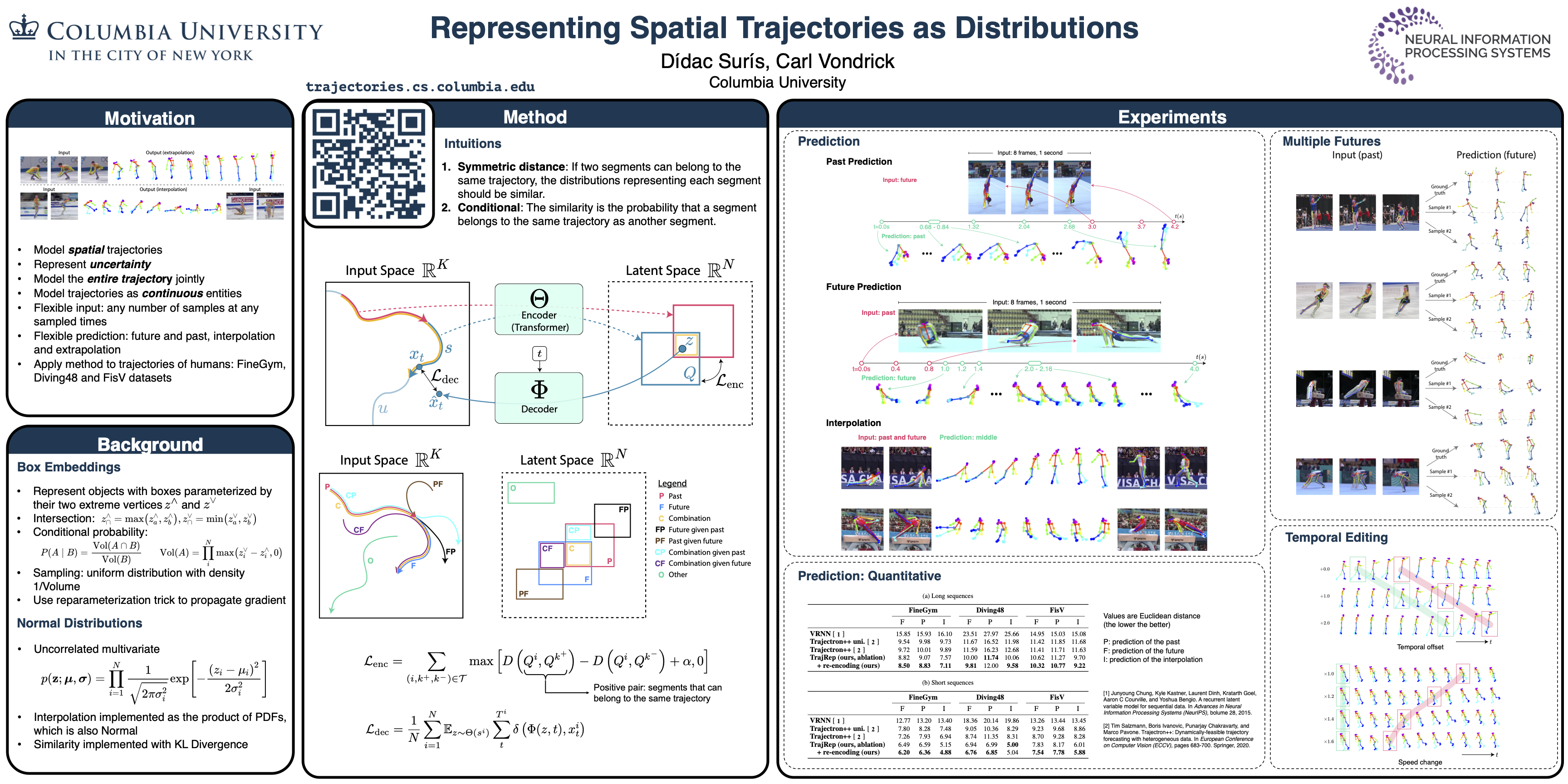
We introduce a representation learning framework for spatial trajectories. We represent partial observations of trajectories as probability distributions in a learned latent space, which characterize the uncertainty about unobserved parts of the trajectory. Our framework allows us to obtain samples from a trajectory for any continuous point in time—both interpolating and extrapolating. Our flexible approach supports directly modifying specific attributes of a trajectory, such as its pace, as well as combining different partial observations into single representations. Experiments show our method's superiority over baselines in prediction tasks.
Video
Chat is not available.
Successful Page Load